For my third year at the EPFL Rocket Team, I started a new research project to replace our passive
rocket fins stabilization with thrust vector control (TVC), thus allowing us to control the rocket trajectory and explore
propulsive landing technologies.
First test setup for the jet vanes
After a semester of research in Autumn 2020, I recruited a team of 12 students
to work on the TVC mechanism and test bench, and help me develop the Guidance,
Navigation, and Control (GNC) algorithms I was working on as part of my thesis.
To control the thrust direction of the rocket engine, we developed custom jet vanes,
which are small aerodynamic surfaces that redirect the flow of the engine. We simulated,
manufactured, and tested many different shapes and materials to have the right thermal
and aerodynamic properties. In the end, we chose graphite for its resistance to heat and low density.
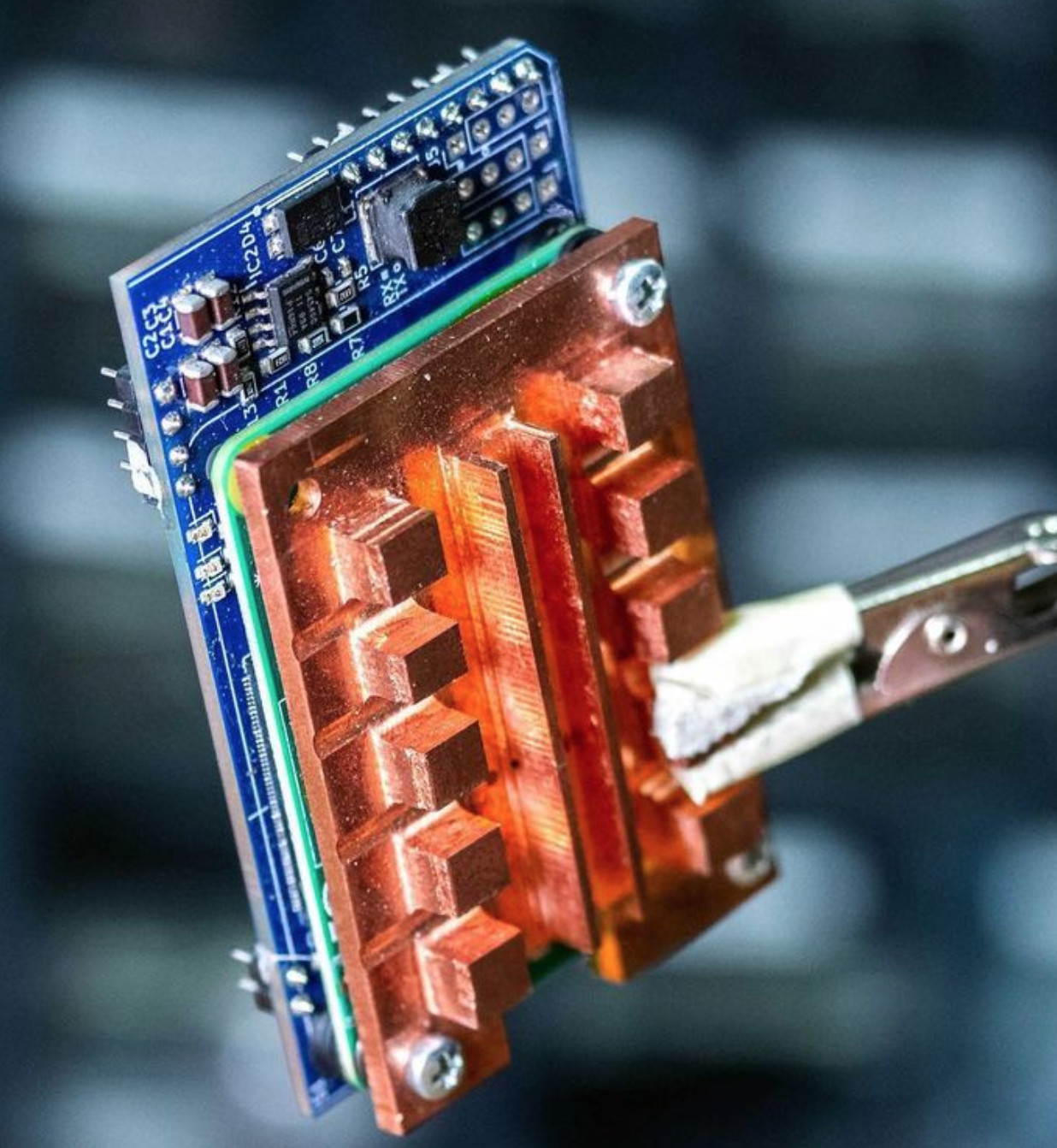
A custom PCB was developed by Iacopo Sprenger
to integrate a RaspberryPi 4 into our modular
flight computer. This gave us a lot more processing power and lets us
experiment with advanced GNC algorithms.
Custom PCB for the RaspberryPi
To control the vehicle, we used Model Predictive Control (MPC) running on the Raspberry Pi
at 50Hz to directly control the actuators. Another MPC was used at a lower
frequency to generate optimal reference trajectories for the controller.
Finally, we used an extended Kalman filter to estimate external perturbations
and model mismatches.
Most of these algorithms were developed by Raphaël Linsen
and tested on our simulator, then deployed on our custom drone.
Check our recent paper to ICRA
for more information on this project!