Alberic de Lajarte
Robotics and Deep Learning Engineer
I have a strong background in control theory and system modeling.
Over the years, I’ve gained broad experience across all areas of robotics: from mechanical design and embedded software to high level control and planning.
I am currently focusing on learning based methods, including reinforcement and imitation learning

Skills
Programming
- C/C++
- ROS
- Python/MATLAB
- Embedded systems
System and Control
- Optimal Control
- Numerical simulation
- State estimation
- System Identification
- Deep Learning
Design and Manufacture
- Computer-Aided Design
- Printed Circuit Boards
- CNC machining
- System engineering
My projects
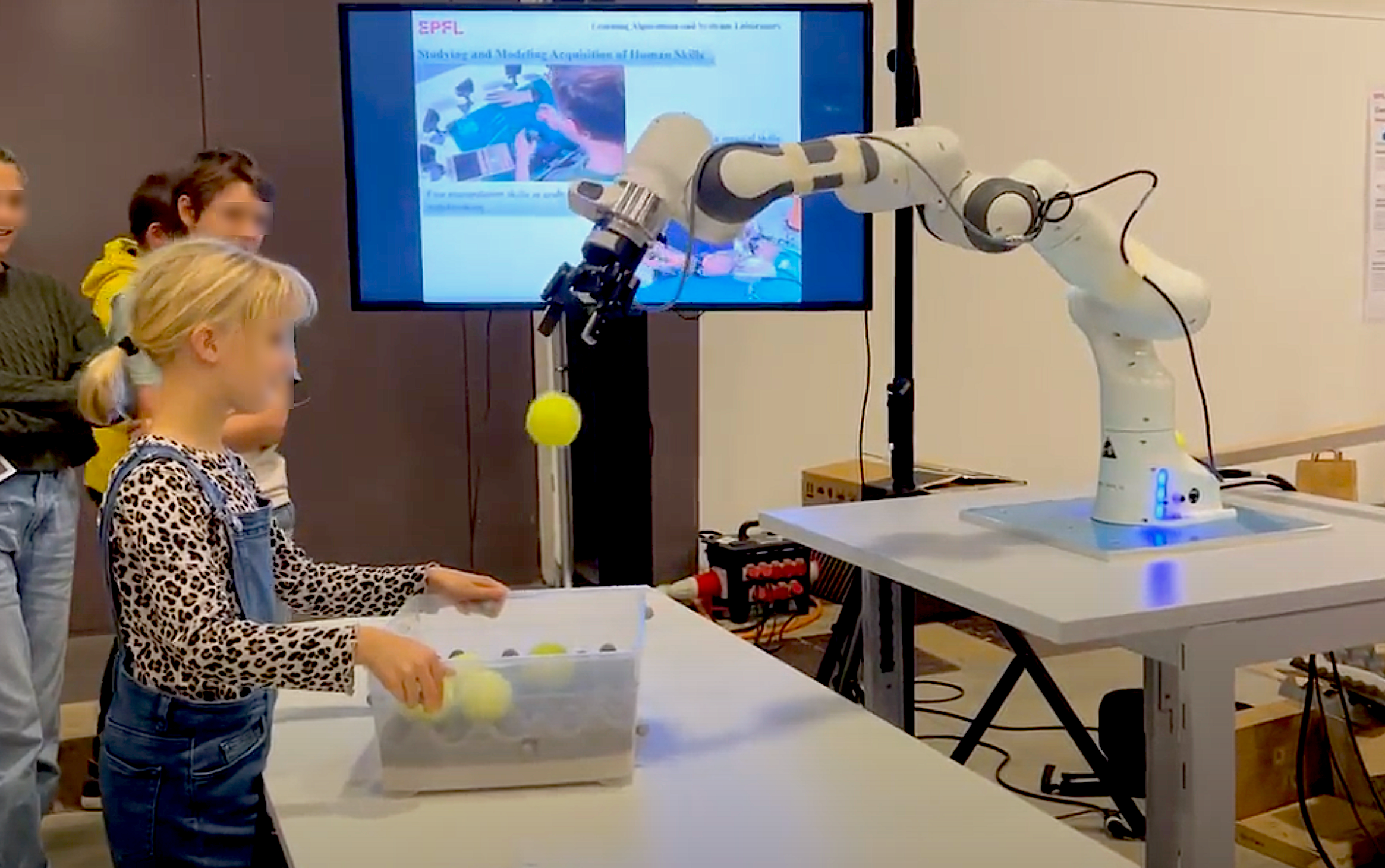
Motion planner for throwing robot
An optimal and constrained motion planner for robotics arm
Learn MoreGuidance, Navigation, and Control of a Sounding Rocket
Optimal Control and Guidance of a Sounding Rocket
Learn More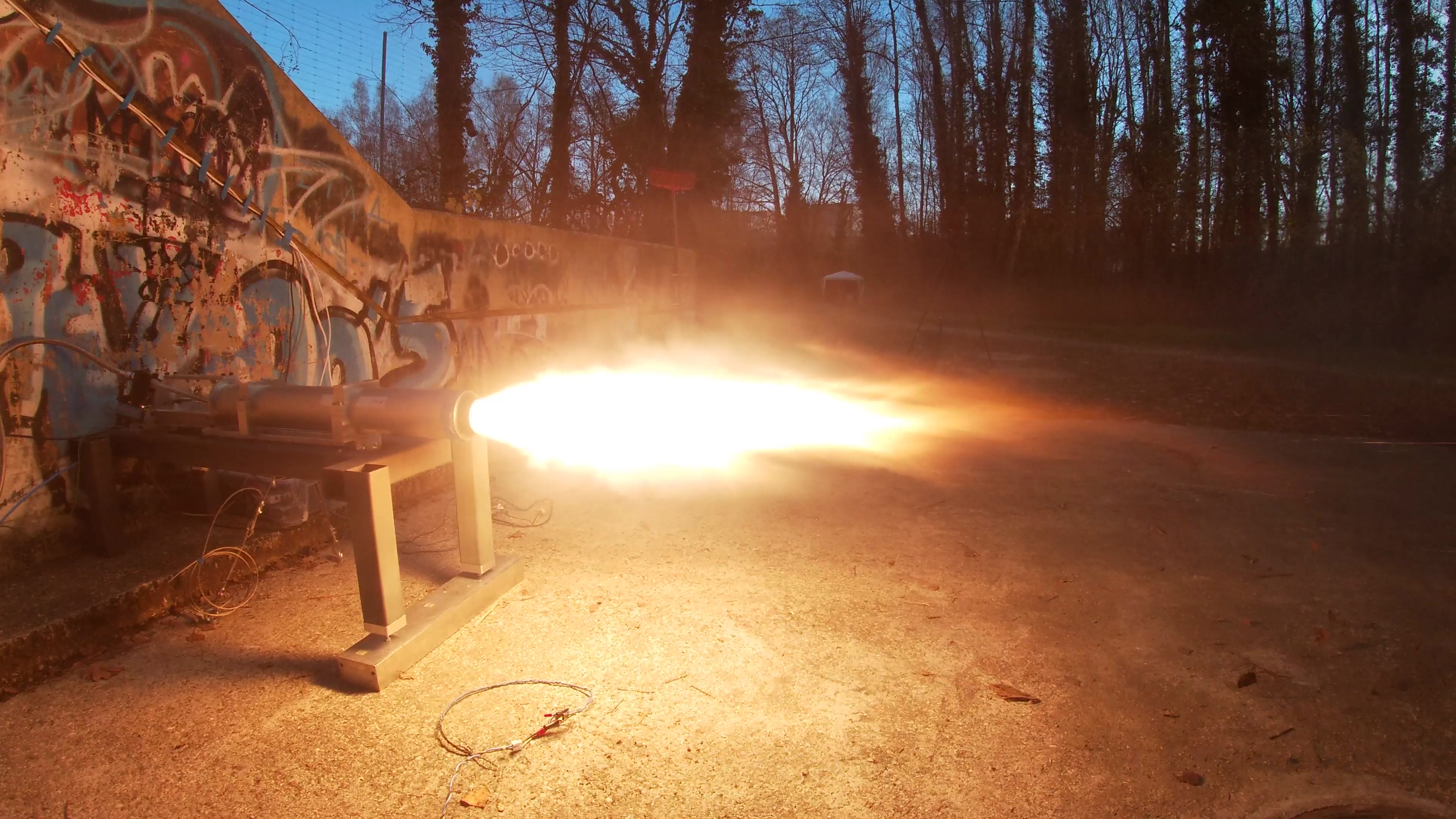

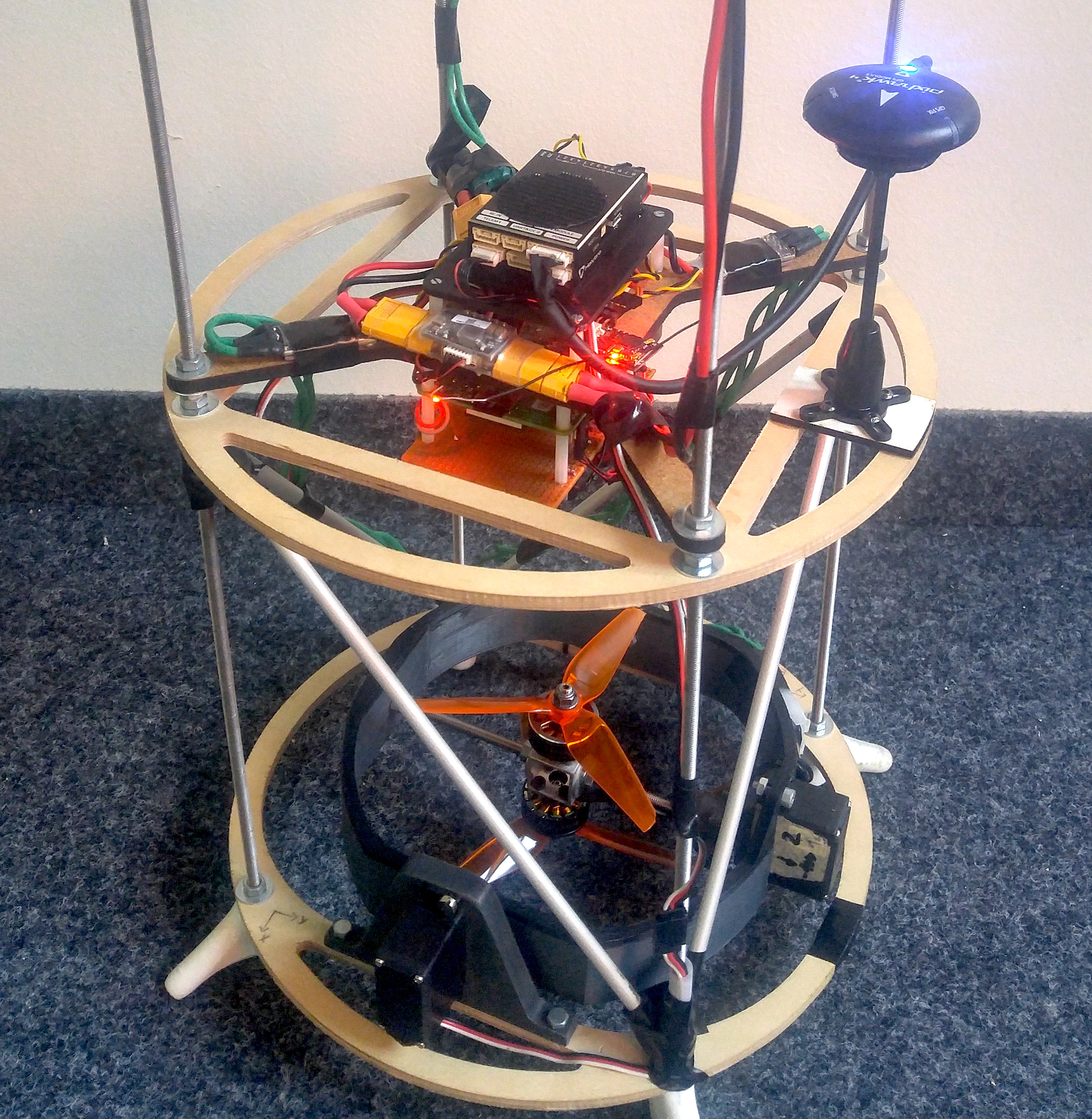
Landing a rocket
Exploring new ways of controlling a hybrid engine for rocket control and landing
Learn More